Eigenvectors and eigenvalues
Under construction: this chapter is still being expanded and revised.
What makes a vector an eigenvector?
An eigenvector is a nonzero vector whose direction is preserved by a matrix transformation. Multiplication by A may stretch it, shrink it, reverse it or collapse it to zero, but the image remains on the same line. The corresponding eigenvalue λ records that one-dimensional action.
Key ideas
Eigenvectors reveal the directions in which a matrix acts most simply.
- A nonzero vector x is an eigenvector of A when Ax = λx
- λ > 1 stretches the eigenvector direction, 0 < λ < 1 shrinks it, λ < 0 reverses it and λ = 0 collapses it
- A matrix may have every direction as an eigenvector, only selected directions or no real eigenvectors at all
- For a diagonalizable matrix, the eigenvectors form a basis C and A = CDC⁻¹
- For a real symmetric matrix, the eigenvectors can be chosen orthonormally, so A = QDQᵀ
- An orthogonal projection has eigenvalues 1 on the preserved subspace and 0 on the collapsed subspace
- A reflection has eigenvalue 1 on its mirror subspace and −1 on the orthogonal direction
- Along M(t) = (1 − t)I + tA, every eigenvector of A keeps the same direction while its eigenvalue moves linearly from 1 to λ
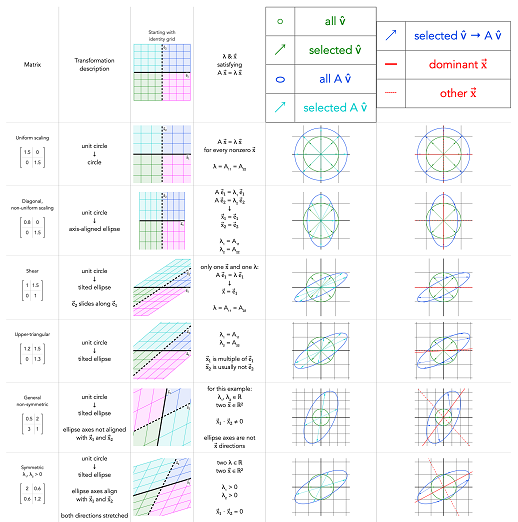
The chapter uses geometric examples to connect the equation Ax = λx with the visible action of scaling, shear, projection, reflection, rotation and other transformations.
Why is diagonalization useful?
In an eigenvector basis, the matrix acts independently on each coordinate direction. The change-of-basis matrix C moves into eigenvector coordinates, the diagonal matrix D applies the eigenvalue scalings and C⁻¹ returns to the original coordinates. Thus A = CDC⁻¹ replaces a coupled transformation by separate one-dimensional actions.
Related chapters
Examples with visualizations
Eigenvectors — definition and examples
Eigenvector directions across scaling, shear, symmetric matrices, projection, reflection, rotation and other 2D transformations
Chapter contents
The PDF page links below are best-effort: most browsers support them, but some viewers may ignore the page hint.
What happens to eigenvectors during the animation interpolation?
For M(t) = (1 − t)I + tA, an eigenvector x of A remains an eigenvector of every intermediate matrix: M(t)x = (1 − t + tλ)x. Its direction therefore stays fixed, while its eigenvalue changes linearly from 1 to λ. When λ < 0, the direction shrinks to zero and then reappears reversed.