Eigenvectors: Definition and Transformation Examples
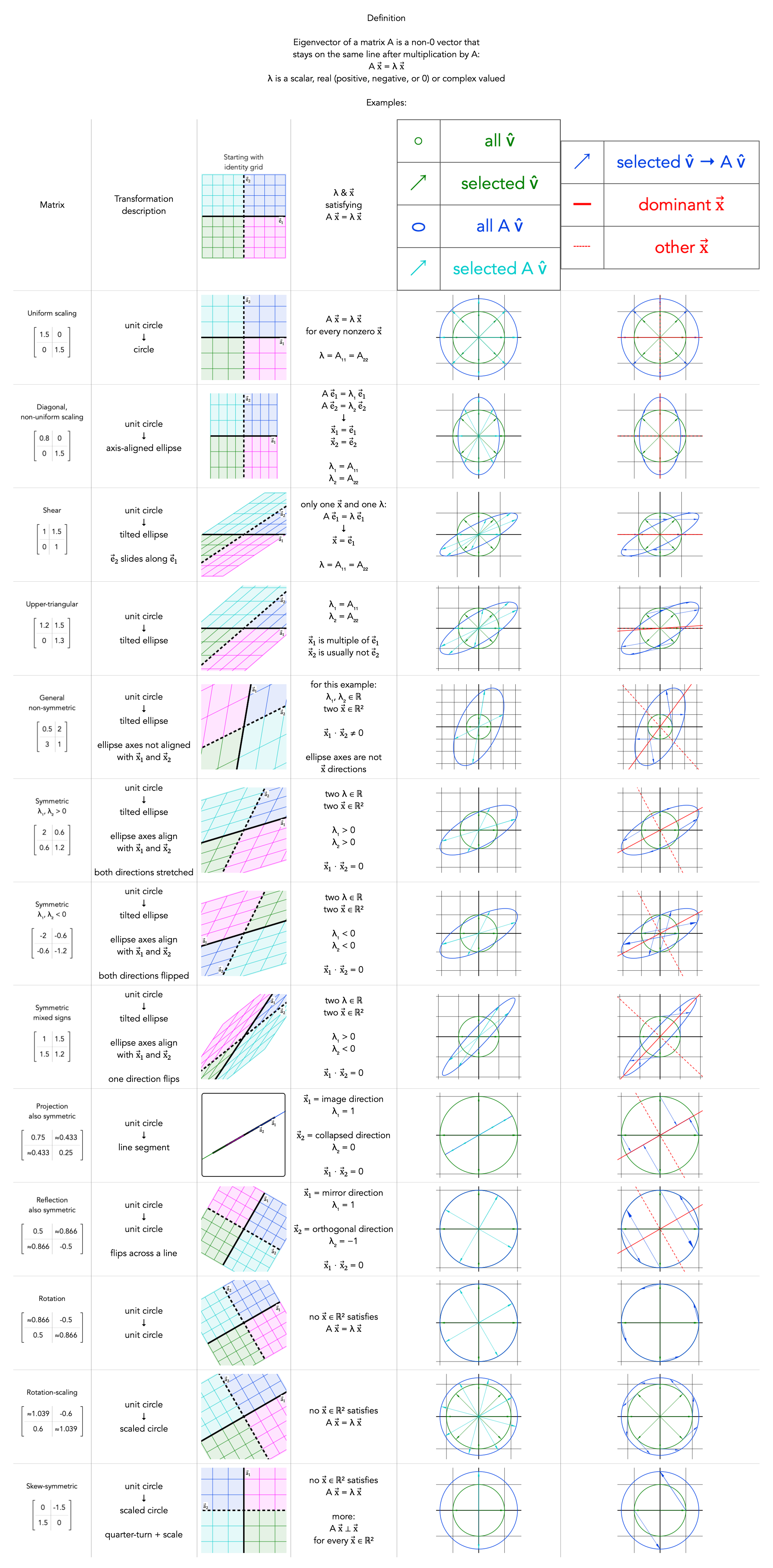
An eigenvector is a nonzero vector whose direction stays on the same line after multiplication by a matrix. The corresponding eigenvalue tells how that direction is stretched, shrunk, reversed or collapsed.
The visual compares common 2D transformations and shows whether every direction, only selected directions or no real direction satisfies A x⃗ = λx⃗.
Definition and examples across 2D transformations
Each row compares the matrix, the visible transformation of the grid, the eigenvalue information and the directions that remain on their original lines. The examples include uniform and nonuniform scaling, shear, triangular and general matrices, symmetric matrices, projection, reflection, rotation, rotation-scaling and a skew-symmetric matrix. Click the image to open the full-size version.
Concept
The defining equation A x⃗ = λx⃗ means that the image of x⃗ remains on the same line as x⃗. When λ > 0, the direction is preserved; when λ < 0, it is reversed; and when λ = 0, it is collapsed to the zero vector.
Structure
A scalar multiple of the identity has every nonzero vector as an eigenvector. A typical shear has one real eigenvector direction. A real symmetric matrix has orthogonal eigenvector directions, while a genuine 2D rotation has no real eigenvectors unless the angle is 0 or π.