Projection Formula Derived from the Definition
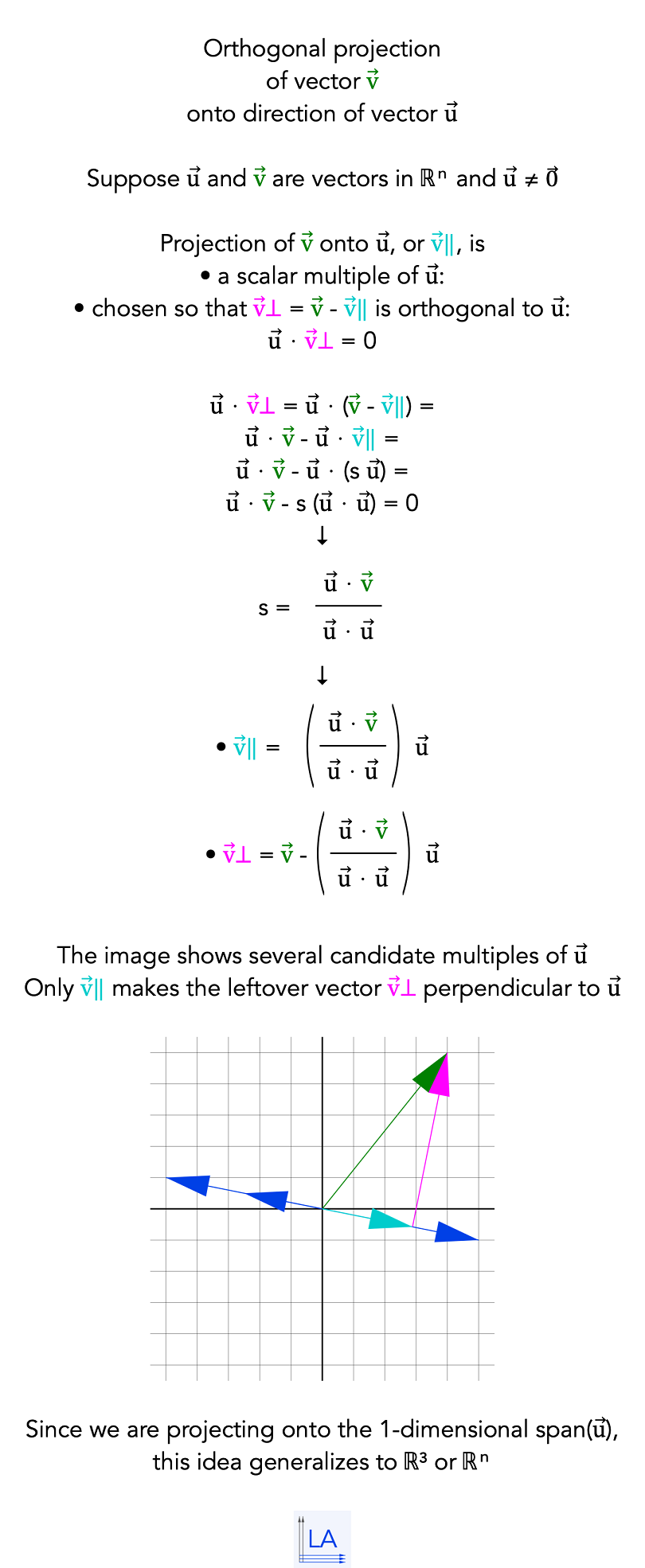
Orthogonal projection is defined by a decomposition v⃗ = v⃗⊥ + v⃗∥. The projected part v⃗∥ lies in the chosen direction or subspace, while the residual v⃗⊥ is perpendicular to it.
Those two conditions determine the familiar formulas. The one-vector case and the column-space case are the same derivation with a scalar coefficient replaced by a coordinate vector.
Projection onto the direction of one vector
Projection onto the column space of U
Concept
Projection onto one vector is the one-dimensional case. The unknown coefficient is a scalar s, and the projected vector is a multiple of u⃗.
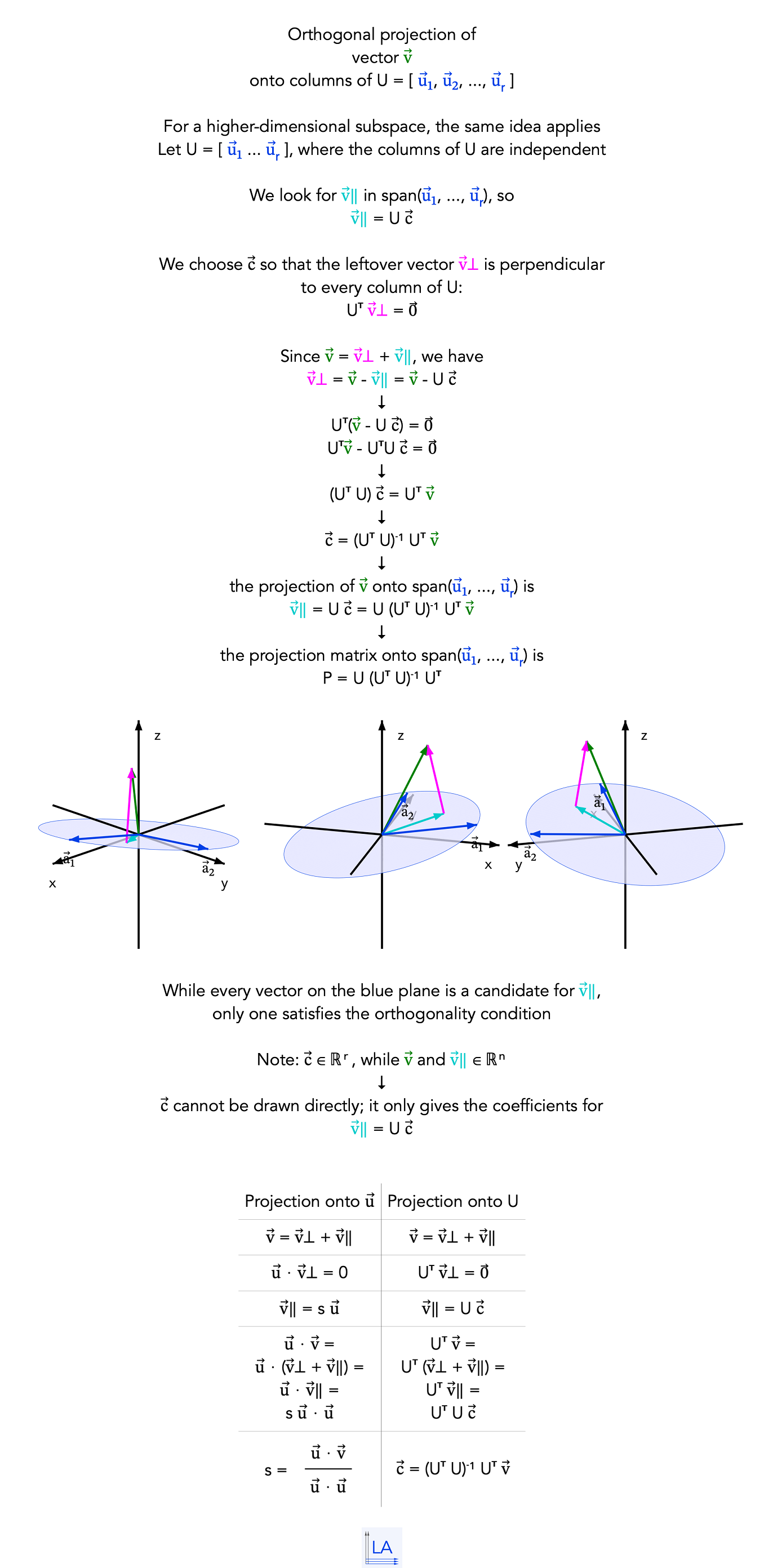
Projection onto col(U) uses several independent spanning directions. The unknown coefficients form c⃗, and Uc⃗ is the vector in the subspace selected by the orthogonality condition.
Structure
In both derivations, the projected vector is first written in the required subspace. Then the residual is formed and required to be orthogonal to that subspace. Solving the resulting equation determines the projection.
This is why the formulas are structurally parallel: a dot product with u⃗ in the one-dimensional case becomes left multiplication by Uᵀ in the general case.
Key equations
The matrix formula assumes that the columns of U are linearly independent, so UᵀU is invertible.
Query phrases
- projection formula derived from the definition
- derive orthogonal projection formula
- why projection formula works
- projection onto a vector derivation
- projection onto a subspace derivation
- derive P = U(U transpose U) inverse U transpose
- orthogonal residual projection formula
- normal equations from projection