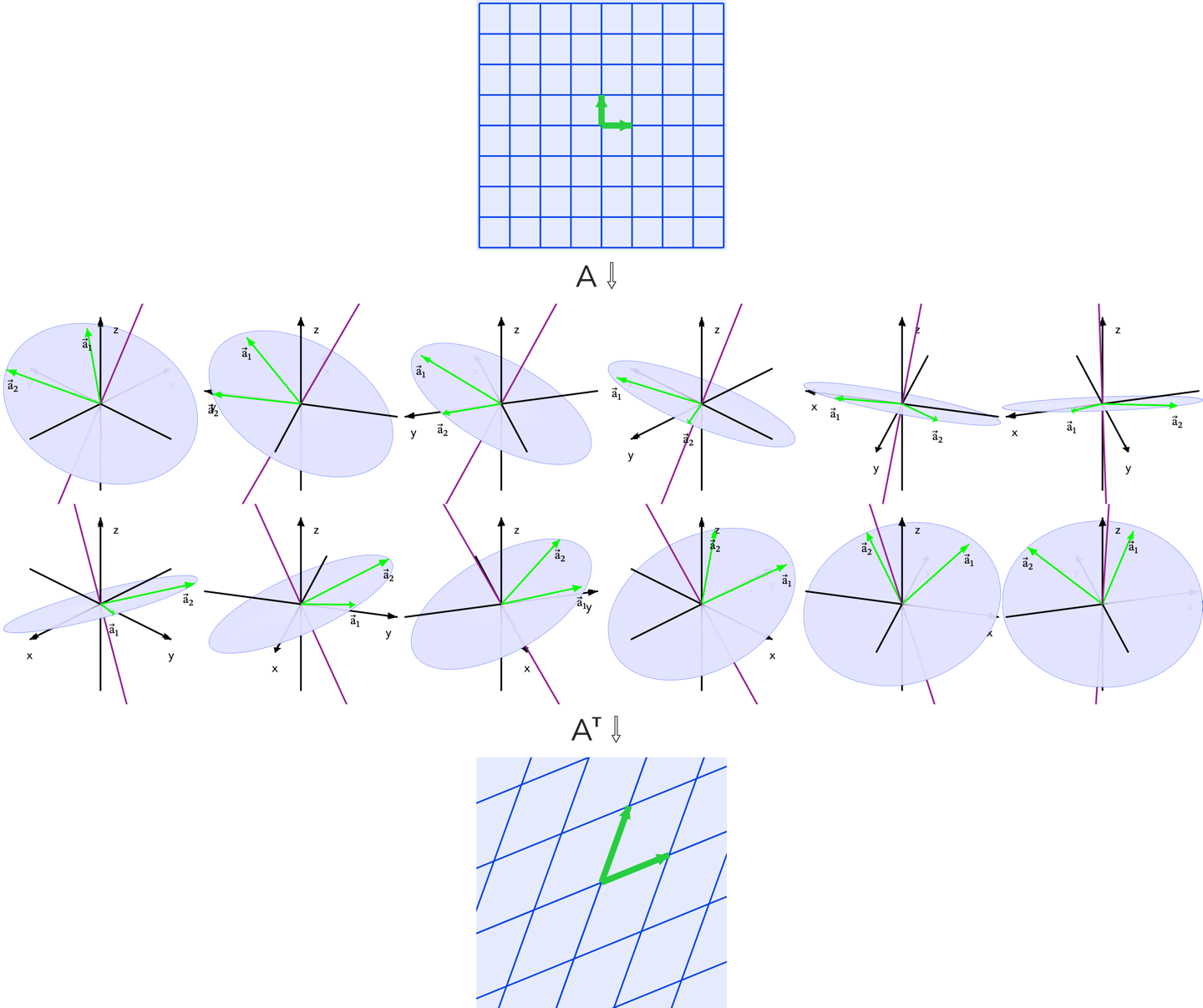
Geometric view of transformations by A, Aᵀ & AᵀA
We are looking at the same 3×2 matrix
A = [ a⃗₁ | a⃗₂ ]
with linearly independent a⃗₁ and a⃗₂ in ℝ³ and rank(A) = 2
Transformations by A, followed by Aᵀ
Direct transformation by AᵀA
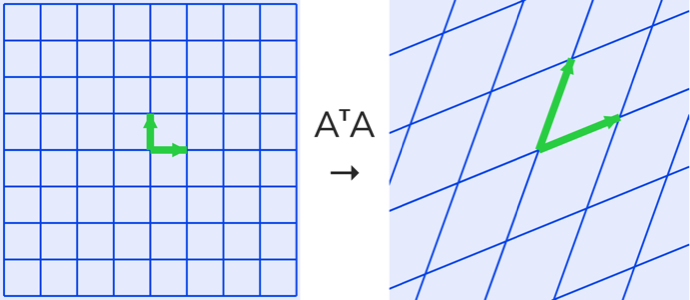
Note changing relationship between a⃗₁ & a⃗₂
This is because AᵀA applies the same distortion twice: once to embed the grid via A and once pull that geometry back via Aᵀ
Suppose a⃗₁ & a⃗₂ are orthogonal with length = 1
In this case AᵀA is identity and the grid returns to original state
This is how to measure “grid distortion” by A
Suppose we have vectors x⃗ & y⃗ in the original plane, so their dot product = x⃗ᵀ · y⃗
After transformation by A, dot product becomes
(A x⃗)ᵀ · (A y⃗) = x⃗ᵀ AᵀA · y⃗ = x⃗ᵀ · (AᵀA y⃗)
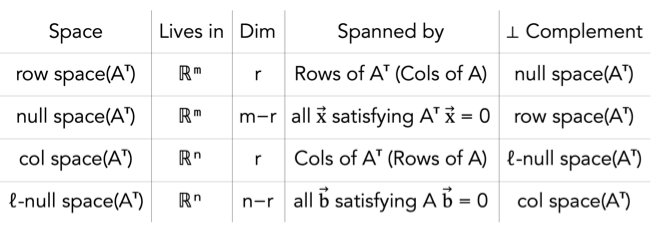
The four subspaces of Aᵀ
We now apply the same construction to the transpose matrix Aᵀ:
rows of Aᵀ are columns of A and columns of Aᵀ are rows of A
| Space | Lives in | Dim | Spanned by | ⊥ Complement |
|---|---|---|---|---|
| row space(Aᵀ) | ℝᵐ | r | Rows of Aᵀ (Cols of A) | null space(Aᵀ) |
| null space(Aᵀ) | ℝᵐ | m−r | all x⃗ satisfying Aᵀ x⃗ = 0 | row space(Aᵀ) |
| col space(Aᵀ) | ℝⁿ | r | Cols of Aᵀ (Rows of A) | ℓ-null space(Aᵀ) |
| ℓ-null space(Aᵀ) | ℝⁿ | n−r | all b⃗ satisfying A b⃗ = 0 | col space(Aᵀ) |
Connecting the null spaces of A and Aᵀ
① null(A) = ℓ-null(Aᵀ)
Proof
Let x⃗ be a vector in ℝⁿ
Recall the transpose identity for matrix-vector multiplication:
(A x⃗)ᵀ = x⃗ᵀ Aᵀ
Now prove set inclusion in both directions
Since each set is contained in the other, the two sets are equal
② ℓ-null(A) = null(Aᵀ)
Proof
Let y⃗ be a vector in ℝᵐ
Recall the transpose identity:
(y⃗ᵀ A)ᵀ = Aᵀ y⃗
Thus the two spaces are also equal
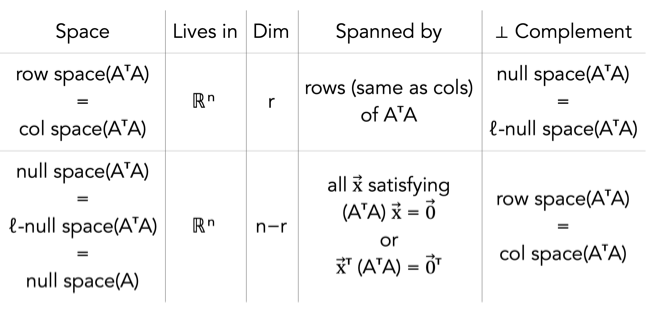
The four subspaces of AᵀA
Consider any m×n matrix A
① null(AᵀA) = null(A)
Suppose vector x⃗ ∈ null space(A), or A x⃗ = 0⃗
Then (AᵀA) x⃗ = Aᵀ(A x⃗) = 0⃗
↓
null space(A) ⊆ null space(AᵀA)
To prove the reverse inclusion, suppose vector y⃗ ∈ null space(AᵀA), or (AᵀA) y⃗ = 0⃗
Multiply on the left by y⃗ᵀ:
y⃗ᵀ(AᵀA)y⃗ = 0
y⃗ᵀ(AᵀA)y⃗ = (A y⃗)ᵀ(A y⃗) = ‖A y⃗‖²
So ‖A y⃗‖² = 0 ⇒ A y⃗ = 0⃗
↓
null space(AᵀA) ⊆ null(A)
Together:
null space(AᵀA) = null space(A)
② AᵀA is symmetric
↓
• row space(AᵀA) = col space(AᵀA)
• ℓ-null space(AᵀA) = null space(AᵀA)
↓
four subspaces of A reduce to two
| Space | Lives in | Dim | Spanned by | ⊥ Complement |
|---|---|---|---|---|
| row space(AᵀA) = col space(AᵀA) | ℝⁿ | r | rows (same as cols) of AᵀA | null space(AᵀA) = ℓ-null space(AᵀA) |
| null space(AᵀA) = ℓ-null space(AᵀA) = null space(A) | ℝⁿ | n−r | all x⃗ satisfying (AᵀA) x⃗ = 0⃗ or x⃗ᵀ (AᵀA) = 0⃗ᵀ | row space(AᵀA) = col space(AᵀA) |
Suppose A is a “tall” matrix with m > n and full column rank
↓
AᵀA has full rank = n
↓
(AᵀA) x⃗ = Aᵀb⃗ has a single solution
Importance of this concept will be illustrated on the next page