Rodrigues Rotation Formula — Geometric Construction
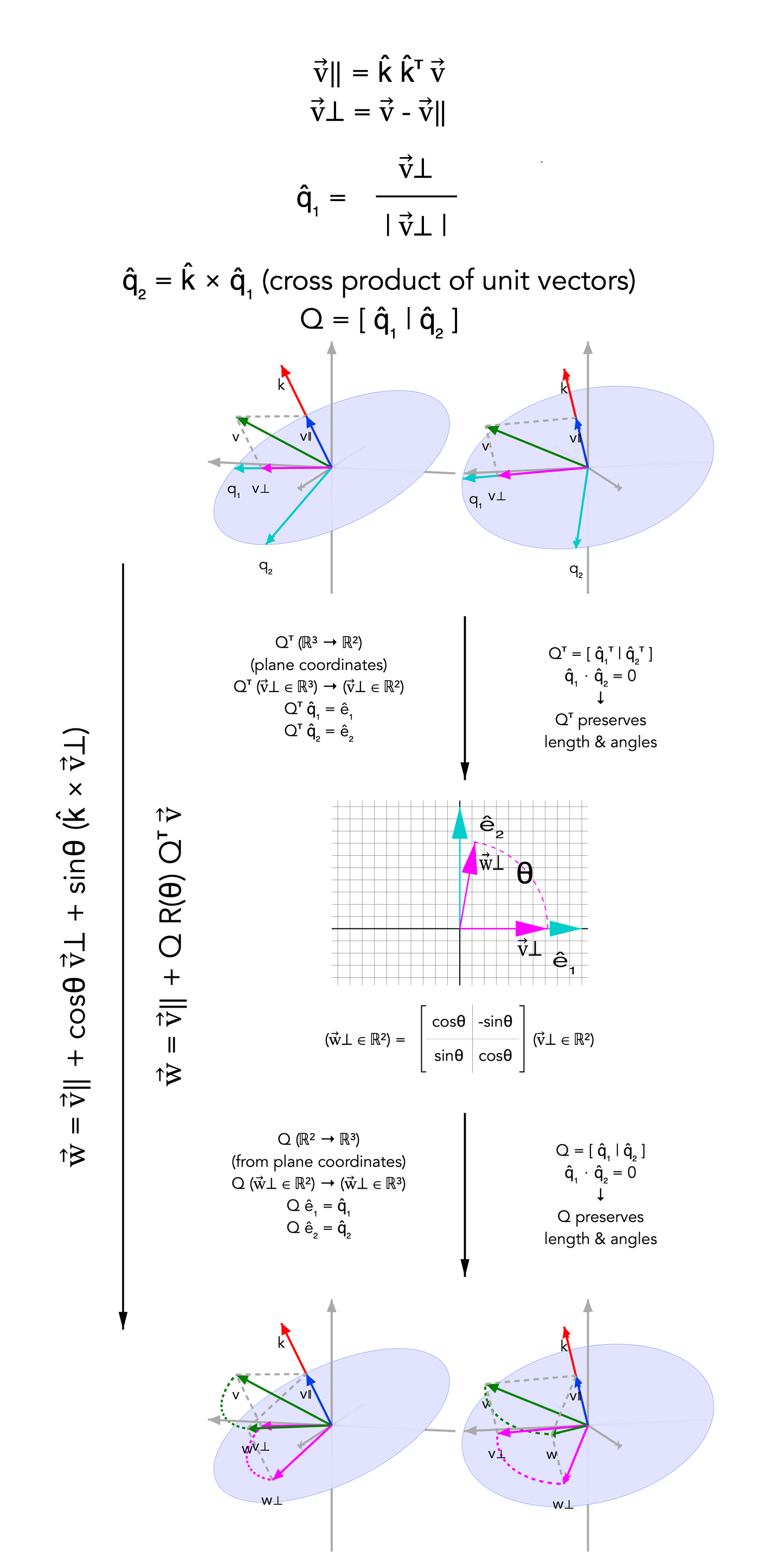
Rodrigues rotation formula rotates a vector v around a unit axis k̂ by splitting the vector into two parts: the axial component parallel to k̂ and the planar component perpendicular to k̂. The parallel part stays fixed, while the perpendicular part rotates inside the plane orthogonal to the axis.
Visual 1 — Step-by-step construction
Visual 2 — Animation
Concept
Let k̂ be a unit vector along the rotation axis and let v be any vector in R³. The axial component is v∥ = k̂ k̂ᵀ v and the perpendicular component is v⊥ = v − v∥.
The vector v∥ is already aligned with the axis, so it does not move under rotation about that axis. The whole problem reduces to rotating v⊥ by angle θ inside the plane orthogonal to k̂.
Structure
Choose an orthonormal basis (q̂₁, q̂₂) for the rotation plane, where q̂₁ points along v⊥ and q̂₂ = k̂ × q̂₁. Then the planar part can be expressed in 2D coordinates, rotated by the standard 2D rotation matrix and mapped back to 3D.
This separates 3D rotation into three pieces: keep the axial part, rotate in plane coordinates and recombine.
Key equations
These forms say the same thing in different languages: projection onto the axis, rotation in the perpendicular plane and recombination into the final rotated vector.
Query phrases
- Rodrigues rotation formula geometric derivation
- how Rodrigues rotation formula works geometrically
- rotate vector around axis in 3D
- Rodrigues formula as rotation in the perpendicular plane
- decompose vector into parallel and perpendicular parts for rotation
Reference
External reference: Wikipedia — Rodrigues' rotation formula, derivation section